1q125h
4w1c57Carro Robot Teleoperado:exploracin y registro de manifestacin rupestre en el interior de oquedades rocosas Enrique Osman Acasio. [email protected] Ing. Industrial.
resumen El presente artculo tiene como objetivo mostrar la aplicacin de un vehculo robtico terrestre para hacer recorridos sistemticos de manera teleoperado en sitios remotos e inexplorados de oquedades rocosas como; grietas, cuevas, catedrales, cmaras y hendiduras en la topografa del terreno que alguna vez hayan sido accesibles al hombre, y del cual se presuma evidencias arqueolgicas y/o arte rupestre en su interior. Un robot que permita estudiar, explorar y registrarparedes naturales en busca de pictografa y petroglifos plasmados por los antiguos moradores, as como afloramiento de cermica, tiestos y artefactos lticos en el interior de las mismas.Para tal fin se dise y construy un prototipo de carro robot de nombre “Cruxent 1”. El artculo se estructura de la siguiente manera: despus de la introduccin, la seccin 2 describe el robot teleoperado. La seccin 3 detalla pruebas y resultados del funcionamiento del robot. La seccin 4 describe los registros y resultados del hallazgo de pintura parietal obtenidos en la campaa de exploracin de la cueva “la Pea Manaure”, perteneciente al eje de la sierra de Coro, Estado Falcn. Venezuela.Finalmente, la seccin 5 concluye el artculo y apunta las posibilidades de mejorar el prototipo. El artculo pretende mostrar un enfoque de la Ingeniera como elemento de sustentopara el estudio de manifestaciones rupestres, una disciplina que se une para obtener registros de campo de modo fidedigno y preciso. Palabras Claves: Regstro, Robots, teleoperacin, cuevas, Arte Rupestre.
Los robots son la integracin en correcta armona de partes mecnicas, electrnicas y sistemas de informacin, desarrollados con un propsito especfico, principalmente la exploracin del ambiente y recopilacin de datos, as como la manipulacin de objetos. En aos recientes, ha aumentado el desarrollo de vehculos robticos, en respuesta a la necesidad de realizar trabajos que resultan riesgosos para el hombre. Estos robots han sido desarrollados con base en las especificaciones de la tarea a realizar y de las condiciones del ambiente de trabajo. Los vehculos robticos interactan en ambientes con obstculos tanto estticos como dinmicos; si es un ambiente conocido, es posible desarrollar trayectorias fijas que evadan obstculos, pero esto resulta intil cuando la informacin del rea de trabajo es insuficiente o se trabaja en lugares donde el interior podra ser ignoto como en el caso de las cuevas, donde la trayectoria inicial es modificada constantemente y la planeacin debe ser flexible y ajustada a cambios. Para estos casos, se propone un esquema de supervisin o teleoperacin para mantener el control del robot o bien para cambiar acciones o rutas, por lo tanto es necesaria la intervencin humana siendo el el encargado de controlar el rango entero de la funcionalidad del sistema, desde el seguimiento de trayectoria hasta el registro y control de la data.
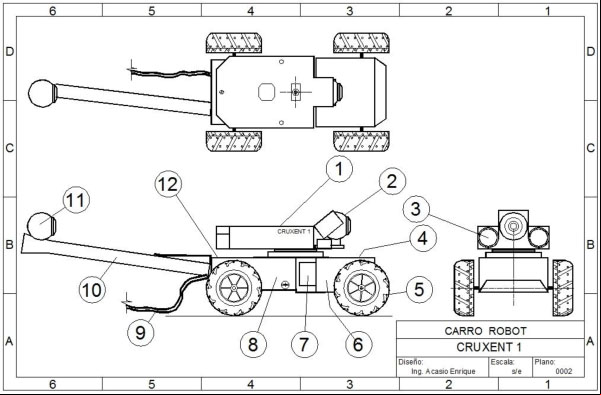
El robot Cruxent 1.- en honor a tan ilustre hombre que contribuy de manera tan slida a la arqueologa en Venezuela.- fue creado mediante la concepcin modular de los componentes, lo cual simplifica la actualizacin del vehculo con nuevos equipos y tambin facilita el a los componentes para su reparacin o mantenimiento. Algunos de los mdulos(electrnicos, elctricos o mecnicos) son instalados directamente en el interior del chasis del robot, entregando as una arquitectura ideal de diseo, por su simplicidad, robustez y bajo coste. La configuracin bsica del prototipo de carro robots se encuentra descrita a continuacin, y mostrado en la figura 1: (1) Torreta Giratoria de Exploracin y registro. (2) Cmara digital. (3) Faros Halgenos. (4) Portezuela de a interior de cuerpo articulado delantero. (5) Ruedas de traccin moldeadas en silicn duro blanco. (6) Cuerpo articulado delantero. (7) Motores de traccin y direccin delanteros. (8) Cuerpo articulado Posterior. (9) Cordn umbilical para control, gua y registro. (10) Apndice posterior como base de cmara digital. (11) Cmara digital para panormica posterior. (12) Portezuela de a interior de cuerpo articulado posterior.
<![endif]>
El chasis del robot esta hecho de lmina de acero
galvanizado, constituido por dos cuerpos articulados, permitiendo as el cambio
de direccin. El cuerpo articulado posterior, de mayores proporciones contiene
en su parte superior la torreta giratoria de exploracin y registro con un
rango de giro de 360 para evaluar con exactitud las condiciones del entorno. Permitiendo capturar panormicas horizontales
en 360 tanto en sentido de giro horario como anti horario. Movimiento que es
logrado mediante un motor elctrico y un sistema de corona y pin como
elemento reductor. Ambos cuerpos articulados poseen portezuelas para permitir
el al interior del chasis para reparaciones o mantenimiento al sistema
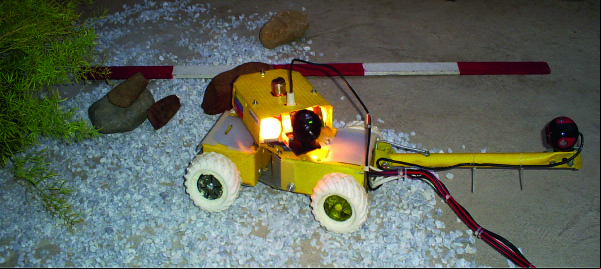
elctrico y mecnico. Los cuerpos articulados, el apndice posterior y la torreta de exploracin fueron
pintados de un amarrillo intenso como referencia para ser distinguido con mayor
claridad en el interior de las cuevas, as como tambin de aumentar la
posibilidad de identificar y recuperar mediante otro carro robot ante una
posible prdida, como se muestra
en la figura 3.
<![endif]>
<![endif]>
La primera prueba de avance, se realiz sobre una superficie de concreto plana, en sta prueba se descart el uso de terreno pedregoso, debido a que el robot solo contaba con traccin en las ruedas delanteras, el objeto de la prueba era calibrar el sistema de direccin mediante controles en el sistema de traccin y los cuerpos articulados. De esta manera se logra un avance ms eficiente en cuanto a trayectoria y traccin. Al avanzar, el robot no lograba seguir una lnea recta a pesar de que los dos motores posean la misma especificacin tcnica de torque y revoluciones.Esto se deba a que un motor hacia girar su rueda ms rpido que el otro. Para resolver esto, se le asign un potencimetro al motor elctrico de mayor revolucin para poder igualar los valores de potencial elctrico obteniendo as la misma cantidad de revoluciones por segundo para ambos motores. Para lograr que el carro pudiese avanzar de manera lineal fue necesario ajustar la velocidad de las ruedas del robot. Las otras pruebas preliminares estaban dedicadas al giro en panormica de la torreta, encendido/ apagado de luces halgenas y pruebas de cmaras y registro en imgenes, sonido y video. Todas estas pruebas fueron realizadas de forma independiente, para finalmente ya establecer el calibrado y ajuste de todo el sistema para realizar una prueba en su totalidad, es decir, todos los sistemas trabajando en paralelo. Para ello se mont un escenario simulado, mostrado en la figura 4, colocndose en el mismo piso plano gran cantidad de piedrecillas y rocas de diversos tamaos que sirvieran de obstculos al robot en su primera prueba, la cual fue muy sencilla. Bsicamente arrancar el robot desde un punto especfico y desplazarlo en lnea recta a unos 5 metros, para explorar todo el entorno y registrar unas piedras y hachas lticas diseminadas en el lugar. Vale reconocer, que la prueba ms importante en s era el sistema de teleoperacin y los registros en video de ambas cmaras, grabando en todo momento la prueba desde sus inicios, cuyo control del carro se realiz desde una habitacin contigua sin mirar directamente el mismo, solo se recurri a la navegacin mediante las imgenes enviadas en tiempo real por el propio robot. El tiempo estimado de pruebas 15 minutos. La segunda prueba del Cruxent 1 fue establecida para verificar la fuerza de arrastre de su cordn umbilical en todo el terreno, maniobrando el carro en crculos y en figuras en forma de ocho, logrando incluso pruebas de regreso en trayectoria y pisando o traspasando por encima de su propio cordn. Tambin se realizaron pruebas de reversa y pruebas de las luces halgenas. El tiempo empleado para las pruebas: 1 hora, y al igual que la primera prueba solo se recurri a la navegacin mediante las imgenes enviadas en tiempo real por el propio robot. La tercera prueba fue una prueba de
campo, en donde se desplaz el carro robot en planos inclinados, en terreno
arenoso y pedregoso, e incluso en charcas de agua para estudiar y mejorar su
desempeo. Las pruebas fueron totalmente satisfactorias, el robot estaba listo
para su primera salida de campo.
<![endif]> <![if !vml]><![endif]> 4.- CAMPAA EN LA SIERRA DE CORO. PRUEBAS Y RESULTADOS
El
carro robot, as como su caja de control y cable umbilical fue embalado en un
contenedor plstico de 35 litros para su transporte, entregando un pes de 7,5
kg. Sumado a ello se cont con una PC porttil y una bolsa de herramientas para
reparar o arreglar posibles desperfectos en campo. Todo el equipo completo debi
realizar un gran recorrido hasta su destino final. Partiendo desde Punto Fijo
en la Pennsula de Paraguan hasta la ciudad de Coro, y de all hacia el
sureste de la capital en un pueblo rural llamado las dos bocas, para finalmente
tomar un todoterreno y trasladarlo
junto al equipo de investigacin a una haciendapresente en el eje de la Sierra de Coro. El sitio de estudio
es una prominente orografa rocosa que se alza majestuosamente en una selva
serrana, una especie de auyan tepui en miniatura de nombre “La Pea Manaure”. Ver
figura 5. En su cima se encuentra un rea casi rectangular conformada por una
gran cantidad de rocas dispuestas en forma de bloques. En su longitudinal este-
oeste mide 52 m, mientras que en su eje transversal
norte-sur mide 44m. Muy cerca del borde norte de la pea, justo en la cima se
encuentra la cueva en estudio.
<![endif]>
<![endif]>
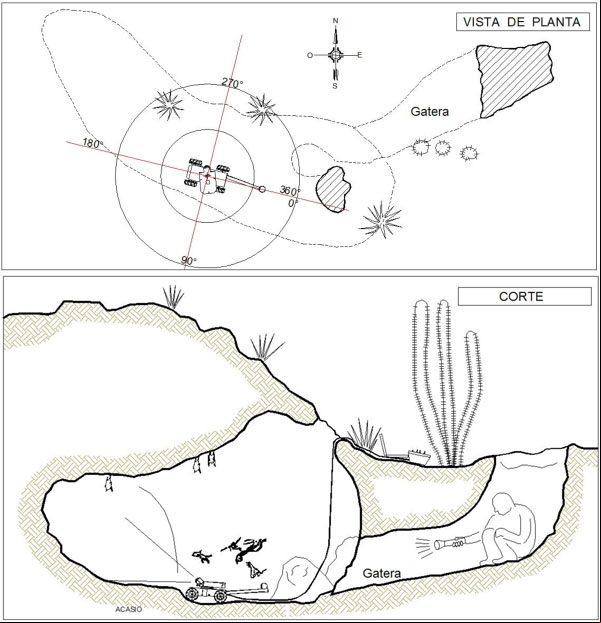
Una vez en el piso de la camara natural, se procedio a realizar barridos con la torreta de observacin para establecer una exploracin previa del entorno, antes de definir una ruta de desplazamiento ideal, mostrado en la figura 8. Una vez reconocido el entorno se envi al cruxent 1 al centro de la camara para dar inicio y realizar de modo sistemtico el registro del interior de la misma, tanto en video como en imgenes. La torreta giratoria logr captar una panoramica horizontal en 360, iniciando su giro y tomando como referencia el apendice posterior del carro, siendo la referencia 0, luego en sentido horario, es decir de izquierda a derecha siguiendo la tcnica empleada por miguel Angel pereira en el estudio de cuevas, se realiz la exploracin de la cueva desde la pared izquierda, luego hacia el fondo para continuar con la pared derecha y finalizar nuevamente en el apendice posterior del cruxent 1, cuando ambas camaras de exploracin se miran una a la otra indicando completado los 360 de giro, requiriendo para ello 4 fotografias por cada cuadrante de 90, mostrando el interior de la cavidad rocosa con un total de 16 imgenes. Estas imgenes fueron tratadas luego en un computador y mediante el metodo de teselacin se logr obtener un mosaico 2D georeferenciado del interior de la superficie inspeccionada, mostrada en la figura 9. Tambien fueron captados algunos murcielagos reposando en las paredes del recinto.
<![endif]>
Debajo de dicha figura se
encuentra otra forma zoomorfa muy peculiar, un animal con el cuello estirado
hacia arriba y sus extremidades o patas muy notorias, ademas de una cola.
Presenta manchas punteadas en el cuerpo, denotando posiblemente la figuracin
de un jaguar tal y como lo muestra la figura 12 en una fotografia retocada en
verde mediante la aplicacin Gimp y un dibujo realizado mediante CAD.
Este artculo ha presentado el concepto de carro robot teleoperado como plataforma mvil para la realizacin de inspecciones visuales en oquedades rocosas que pudiese contener manifestaciones rupestres, bien sea arte parietal o petroglifos en sus paredes, un aporte significativo a la espeleoetnografa. El carro robots Cruxent 1 tiene la capacidad de transitar tanto en ambientes planos como en terreno irregular manteniendo una operacin robusta. Convirtindose as en una plataforma mvil y confiable para estudios sistemticos de oquedades y sistemas krsticos. El carro Cruxent 1 puede ser utilizado como una herramienta para dar apoyo a otras disciplinas como lo es la Espeleopaleontologa, es decir el estudio de restos de vidas extintas presentes en el interior de las cavernas, as como la espeleobiologa, encargada de estudiar la flora y fauna subterrnea. En particular se ha detallado el vehculo diseado y construido, su arquitectura de control, el sistema de navegacin y el sistema de registro. En el apartado de pruebas se ha detallado una serie de pruebas inciales para la optimizacin del funcionamiento. Se ha descrito una campaa realizada en una cueva ubicada en el eje de la sierra de Coro, especficamente en la Pea Manaure, localizada en el Estado Falcn, Venezuela logrando el hallazgo de manifestacin rupestre en el interior de la misma. Los mandos enviados al carro fueron ejecutados en tiempo real, lo que muestra la eficiencia en la comunicacin, procesamiento de informacin y sincronizacin en los procesos. En todo momento se mantuvo una interaccin entre el de control y el Cruxent 1. La torreta de exploracin y registro oper correctamente, a la vez que logro obtener imgenes y video del interior de la oquedad en estudio, mostrando una cmara abovedada que se aprecia bastante estable. Por primera vez en la historia de la arqueologa Venezolana, y posiblemente tercera en el mundo se utiliz un pequeo carro robots equipado con cmaras de video para inspeccionar posibles alberges de nuestros antiguos originarios. En el futuro prximo se tiene proyectado agregar un escner laser tridimensional al robot para que realice registro del interior de las cuevas, logrando as el estudio de las formas y topografas de las cavernas o espeleomorfologia. Un sistema laser lineal que realice barridos sistemticos al entorno y mediante software de captura elaborados en formato libre crear una nube de puntos como un modelotridimensional fidedigno del entorno registrado, el cual es exportado a la aplicacin Blender para su representacin final. Una mini tarjeta madre de computadora modelo PinginoVe ser el cerebro que permita controlar los movimientos precisos del escner laser. Para ello, deben ser programadas rdenes previas e introducidas al hardware mediante una simple conexin puerto USB. Los cdigos de programa o Scribe sern realizados con la API Python. El escner tambin ser utilizada para registrar modelos tridimensionales de material arqueolgico como: vasijas, piezas lticas, hachas que puedan estar presentes en el interior de las cuevas a estudiar.
AGRADECIMIENTOS Este artculo se ha desarrollado como parte del trabajo de investigacin adscrito al Diplomado en Investigacin y Conservacin Preventiva del Arte Rupestre de la Universidad Nacional Experimental Francisco de Miranda (UNEFM). Avalado por el Decanato del rea de Accin Social y el Decanato de Ciencias de la Educacin. Estado Falcn. Repblica Bolivariana de Venezuela. Al autor le gustara agradecer a los Ingenieros Osman Acasio y Alfredo Caguao por su gran aporte en este proyecto.
—Preguntas, comentarios? escriba a: [email protected]— Cmo citar este artculo: Osman Acasio, Enrique. Carro Robot Teleoperado: exploracin y registro
de manifestacin rupestre en el interior de oquedades rocosas. En Rupestreweb, /carrorobot.html 2014 REFERENCIAS ACASIO, ENRIQUE. Piedras Parlantes de Siraba. Acasio Infografic, C.A. 2013. CHIRINOS, CH. “Robtica aplicada a la arqueologa” en Arte rupestre a flor de roca. Huellas Ancestrales. Artculo publicado en Ultimas Noticias. 14 de julio de 2013, pp .12-13. KHAMIS, A. “Interaccin remota con robots Mviles basada en internet” en Tesis doctoral, Departamento de Ingeniera de Sistemas y Automtica. Universidad Carlos III de Madrid. Espaa.2003. PEREZ, J. TOVAR, A. UBALDO, V. “Robot Mvil de Traccin Diferencial con Plataforma de Control Modular para Investigacin y Desarrollo gil de Proyectos” en 10 Congreso Nacional de Mecatrnica. Noviembre 3 y 4, 2011. Puerto Vallarta, Jalisco. REYES, F. CID, J. MENDEZ, J. VILLEGAZ, G. “Diseo, modelado y construccin de un robot mvil.” en 2do Congreso Nacional de Electrnica, 24, 25 ,26 DE SEPTIEMBRE DE 2002 ROLLAND, C. “Descenso de Barrancos / Puenting.” EdimatLibros. 1999. Madrid. Espaa. VILLA, M. GUTIERREZ, J. PORTA, M “Vehculo robtico: autnomo y teleoperado con una PDA” en Ingeniera mecnica Tecnologa y desarrollo. Vol.3. N2. Marzo 2009, pp. 46-54. UNIVERSIA “Robot explora tneles ocultos en Teotihuacn” en Universia, red de Universidades. Robtica. Septiembre 2010. ESPINOZA, J. “Hardware y Software Libres, para una Sociedad Libre” en Talleres de Hardware Libre y Robtica Didctica. UNEFM. Coro.25, 26, 27 y 28 de Febrerol 2013. | |||||||||||||||||||||||||||||||||||